Imitation Learning – Taklit Öğrenme
- Imitation Learning, denetimli öğrenmenin bir versiyonudur. En büyük farkı, tahminlerin sırayla yapılmasıdır.
- Imitation Learning, doğrudan uzman stratejisinin genelleştirilmesinden oluşur.
Taklit Sürüş Politikası
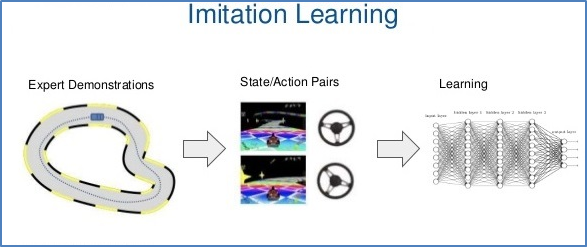
Taklit sürüş politikası için, modelin bir uzmanın (insan) hareketlerini taklit etmeyi öğrendiği Imitation Learning kullanılır.
Burada, uzman yardımıyla eğitim veri seti oluşturulur. Uzmanlar aracı manuel olarak sürer ve yolculuğun her adımında şunlar kaydedilir:
- Çevrenin mevcut durumu (Bu, ham sensör verisini veya kuş bakışı görünüme ait gösterimi)
- Uzmanın çevrenin mevcut durumuna göre hareketleri (direksiyon açısı ve kırılma / hızlanma)
Bu sayede, model tahminleri ile sürücü hareketleri arasındaki hata minimize edilerek (eğitim sırasında), modele sürücüyü taklit etmesi öğretilir.

ChauffeurNet ile Sürüş Politikası
Öncelikle ChaufferNet nedir?
- Amacı, gerçek bir aracı sürerek imitasyon (taklit) öğrenme ile otonom araç sürüş politikasını eğitmektir. En İyiyi Taklit Ederek En Kötüleri Sentezleyerek(yok ederek, kaldırarak) sürmeyi öğrenmektir
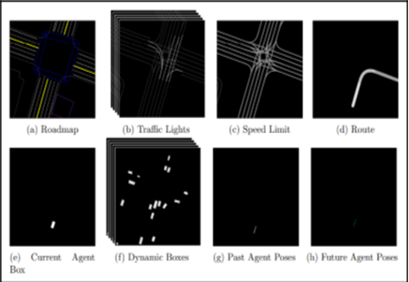
ChauffeurNet, (şerit değişikliklerini, trafik ışıkları, trafik işaretleri, bir caddeden diğerine değişen vb. gibi) karmaşık sürüş durumlarını çözebilir.
Eğitim
ChauffeurNet, Imitation Learning’i kullanarak 30 milyon uzman sürüş örneği ile eğitildi. Aynı zamanda, farklı eğitim verisi kaynaklarını kullanmaya olanak tanır. Bu sayede, gerçek dünyada nadiren meydana gelen olayların(acil frenleme ve hatta çarpma), simüle edilmesini sağlar.

Ali Kerem GÜLER
Stajyer









