Otonom Araçlarda Derin Öğrenme
Kendi kendini süren arabalar ile ilgili, ilk ciddi girişim 1980’lerde Avrupa ve ABD’de başladı. 2000’lerin ortasından bu yana, ilerleme hızla arttı.

OTONOM ARAÇLARA GİRİŞ
Otomotiv Mühendisleri Derneği (SAE) otonom araçlar için altı otomasyon seviyesine sahip bir skala geliştirdi:
> Seviye 0
> Seviye 1
> Seviye 2
> Seviye 3
> Seviye 4
> Seviye 5
Seviye 0 : Sürücü aracın direksiyonunu, hızlanmasını ve frenlenmesini yönetir. Bu seviyedeki özellikler, sadece sürücü eylemlerine yönelik uyarılar ve acil yardım sağlayabilir. Bu seviyenin özelliklerine ait örnekler şunlardır:
- Şerit değiştirme uyarısı: Araç şerit işaretlerinden birinin dışına çıktığı zaman sürücüyü uyarır.
- Kör nokta uyarısı: Aracın kör noktasında başka bir araç bulunduğu zaman sürücüyü uyarır.
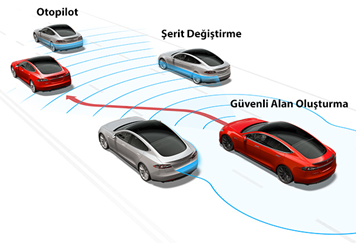
Seviye 1: Sürücüye direksiyon açısı, hızlanma veya fren yardımı sağlayan özellikleri barındırır. Araçlardaki en popüler seviye 1 özellikleri şunlardır:
- Şerit Koruma Yardımı (LKA): Araç şerit işaretlerini tespit edebilir ve kendisini şeritte ortalamak için direksiyonu kullanabilir.
- Adaptif cruise control sistemi (ACC): Araç, önceden belirlenmiş bir hızı korumak veya duruma bağlı olarak hızı azaltmak için diğer araçları tespit edebilir.
- Otomatik acil fren (AEB): Bir engel tespit ederse ve sürücü tepki vermezse aracı otomatik olarak durdurabilir.
Seviye 2: Sürücüye hem direksiyon hem de fren / hızlanma yardımı sağlayan özellikleri barındırır. Burada seviye 1’e ek olarakLKA ve adaptif cruise control sistemi arasındaki kombinasyondur. Bu seviyede araç, sürücüyü önceden uyarmadan herhangi bir anda kontrolü geri verebilir. Bu nedenle, sürücü sürekli yol durumundan haberdar olmak zorundadır. Örneğin, şerit çizgileri bir anda kaybolursa, LKA sistemi sürücünün hemen direksiyon kontrolünü almasını isteyebilir.
Seviye 3: Otonomi hakkında konuşabileceğimiz ilk seviye budur. Bu seviyede otomobil belirli şartlar altında kendisini sürebilir ve sürücünün kontrolünü almasını isteyebilir (level 2’ye benzer) . Bu uyarı, dikkatsiz bir kişinin yol durumuna uyum sağlayabilmesi için yeterli zaman öncesinden yapılır. Örneğin, otomobilin kendisini otoyolda sürdüğünü, ancak bulut sistemine bağlı navigasyonun yoldaki inşaat çalışmaları hakkında bilgi edindiğini düşünelim. Sürücünün inşaat alanına ulaşmadan önce kontrolü almasını istenecektir.
Seviye 4: Bu seviyedeki araçlar, seviye-3’e kıyasla daha geniş bir otonumluğa sahiptir. Örneğin; 4. seviyede, belli bir bölgeyle sınırlı bir taksi hizmeti olabilir. Sürücünün kontrolü almasına gerek yoktur. Bunun yerine, araç bu bölgenin dışına çıkınca, yolculuğu güvenli bir şekilde sonlandırabillmelidir.
Seviye 5: Her koşulda tam otonomluk sunar. Direksiyon kontrolü opsiyoneldir.
OTONOM ARAÇ SİSTEMİNİN BİLEŞENLERİ
Kamera
- Mono Camera: Genellikle ön camın üstüne monte edilmiş, tek bir kamera kullanır. otomasyon özelliklerinin çoğu çalışmak için bu tarz kameralar kullanır.
- Stero Camera: Birbirinden hafifçe ayrılmış, öne bakan iki tane kameranın bulunduğu kamera sistemidir. Kameralar arasındaki mesafe, kameranın aynı resmi farklı açılardan çekmesini ve bunları 3 boyutlu görüntüde birleştirmesini sağlar (Gözlerimizi de aynı şekilde kullanırız). Bir stereo sistem görüntüdeki bazı nesnelerle olan mesafeyi ölçebilir, fakat mono kamera bunu yapmak için sadece sezgisel taramalara güvenir.
Radar: Elektromanyetik dalgalar yaymak için bir vericiyi farklı yönlerde kullanan sistemdir. Dalgalar bir nesneye çarptığında, genellikle radarın olduğu yöne doğru yansır. Radar o dalgaları özel bir alıcı antenle tespit edebilir. Sinyal alma ve sinyalin gelme süresini ölçerek yansıyan cisimle aradaki mesafeyi, hesaplayabilir. Ayrıca, gelen dalgaların frekansları arasındaki farkı ölçerek bir nesnenin hızını ölçebiliriz.
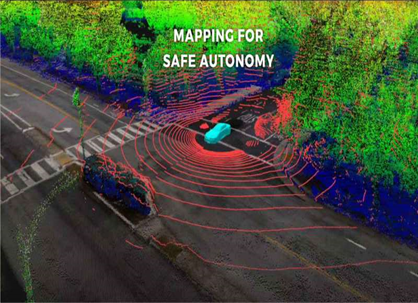
Lidar (ışık algılama ve Uzaklık tayini): Bu sensör radara benzer, fakat radyo dalgaları yerine, yakın kızılötesi spektrumunda lazer yayar. Bu nedenle, yayılan bir titreşim, tek bir noktayla arasındaki mesafeyi doğru bir şekilde ölçebilir. Lidar, bir ortamın 3 boyutlu nokta bulutunu oluşturur.
Araç Lokalizasyonu
Lokalizasyon, aracın haritadaki konumunun tam anlamıyla belirlenmesidir. Peki bu neden önemli?
- Burada yol yüzeyinin tüm alanı birkaç santimetre içerisine sığdırılmıştır. Bu nedenle, aracın yoldaki konumunu tam olarak biliyorsak, optimum yörüngeyi hesaplayabiliriz. Aracın yoldaki konumunu hesaplamak pek de kolay değildir. Bu sorunu çözmenin bir yolu eşzamanlı lokalizasyon ve haritalama (SLAM) algoritmalarıdır.
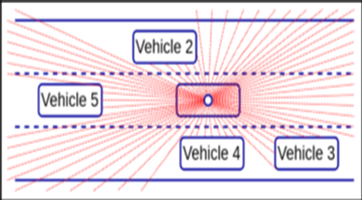
Planlama
Planlama aracın yörüngesinin ve hızının hesaplanması sürecidir. Planlamada, çevrenin dinamiklerini göz önünde bulundurmalıyız. Örneğin; arabanın etrafı diğer araçlar, yayalar, trafik ışıkları vb. İle çevrili olsun.Öndeki araç aniden durursa ne olur? Ya da çok yavaş hareket ederse? AV’miz, kontrolü ele alıp, manevra yapmak zorundadır.Bu, özelikle ML (Makine Öğrenmesi) ve DL’nin (Derin Öğrenme) yararlı olabileceği bir alandır.
Ali Kerem GÜLER
Stajyer









